|
1.项目要求 用ABB机器人实现自动化取件功能。机器人安装在反操作侧,从注塑机顶部取件。
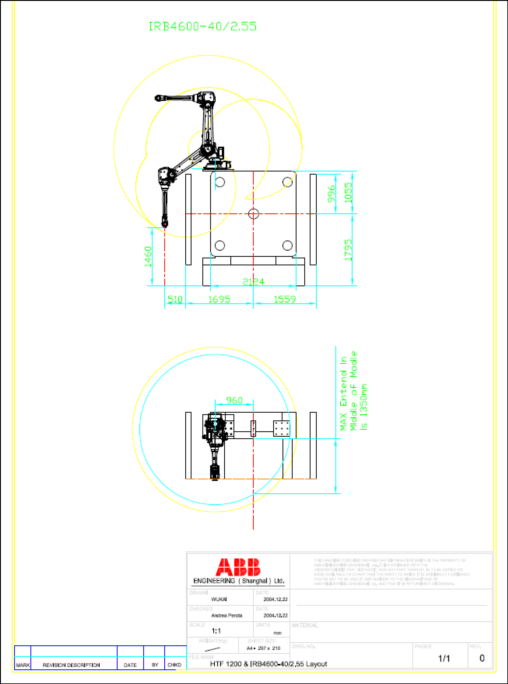
2.平面布局 1200T with IRB4600-40/2.55
3.方案描述 3.1机器人选型 根据海天1200T注塑机尺寸选择IRB4600-40/2.55为配合海天1200T注塑机取件用机器人,该款机器人6轴有效负载达到40Kg,有效工作半径为2.55米。安装在海天1200T注塑机定模板顶部偏向反操作侧,除能达到注塑中心取件外,仍可在模外下探至1450处放件。
3.2机器人阀箱 该款机器人配备注塑取件专用阀箱系统,其特点是扩展性强,便于维护。该阀箱所有气动原件皆采用FESTO品牌部件。阀箱按装在机器人3轴顶部,并由机器人专用PMA管连接到机器人6轴法兰处,所用气管,信号线皆从PMA管内部走线,从而避免机器人关节活动时发生管线缠绕。该款机器人标配阀箱包含了4路带真空监测及吹气功能的真空回路和4路带3/5中封式电磁阀的气夹回路。
3.3工作流程 Step1:机器人在注塑机模上待机位置等待注塑机完全开模后进入模内在动模侧取件 Step2:机器人完放取件后退回到模外待机位置,并让注塑机合模 Step3:机器人移至模外放件位置放件,完成后再次回到注塑机模上待机位置
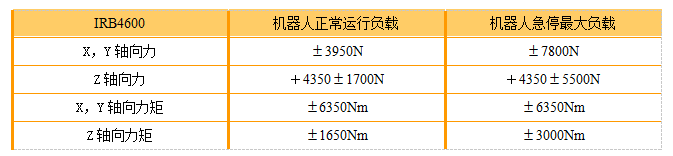
4技术参数 4.1机器人技术参数 4.1.1本体部分(IRB4600-40/2.55) 说明 型号: IRB4600-40/2.55; 手腕持重: 40 kg ; 最大臂展半径: 2550 mm; 轴数: 6; 防护等级: IP67; 安装方式: 地面安装 / 倾斜安装 / 倒挂安装;
性能指标: 位置重复精度: 0.06 mm; 电气连接 电源: 3 相 400V(+10%,-15%), 50Hz; 额定功率: 1.62KW(ISO Cub MAX Velocity);
物理参数 本体总高: 1922 mm; 底座尺寸: 512 mm 676mm; 重量: 435 kg;
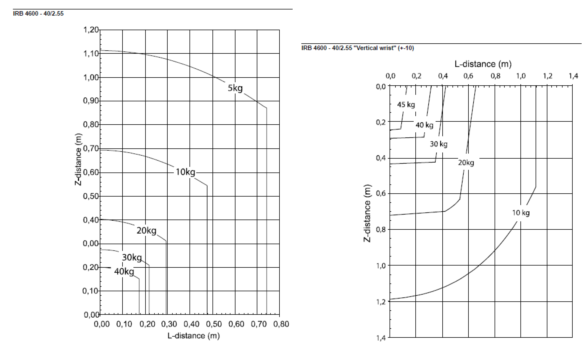
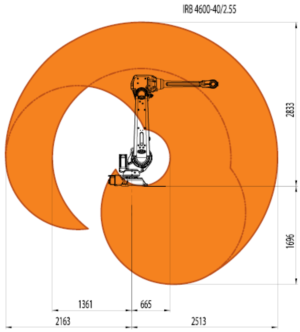
环境参数 环境温度: 5C- 45C; 相对湿度: 95%; 噪声等级: <70dB; 负载图表 工作范围 4.1.2IRC5控制柜 控制硬件:
多处理器系统 PCI 总线 奔腾CPU 大容量闪存(256M) 20s UPS 备份电源;
控制软件: BaseWare5.0 机器人操作系统 强大的RAPID编程语言 PC-DOS文本格式 软件出厂预装,并存于光碟;
电气连接: 电源: 3 相 400V(+10%,-15%),50Hz; 额定功率: 6KVA(IRB140,1410,1600,2400,260,340,4400,6400RF); 13KVA(IRB660,66XX,7600); 输入输出: 数字式直流24V,16进/16出,输入输出板; 安全性: 紧急停止,自动模式停止,测试模式停止等;
物理参数: 尺寸: 970mm×725mm×710mm(单柜); 1370mm×725mm×710mm(双柜); 重量: 150 kg(单柜); 180 kg(双柜);
环境参数: 环境温度: 0C -45C; 相对湿度: 95%; 防护等级: IP54 ;
操作界面: 控制面板: 控制柜上 编程单元: 便携式示教盒,具备操纵杆和键盘 彩色触摸式显示 具中、英文菜单选项 4.2与安装有关的土建参数 厂房净高: 4.8 m; 地基要求:
| 

 狗仔卡
狗仔卡 发表于 2019-11-12 17:22:10
发表于 2019-11-12 17:22:10



 提升卡
提升卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 抢沙发
抢沙发 显身卡
显身卡